聚沃科技电机驱动板简介
应用介绍
写在前面:聚沃科技电机驱动板采用FOC三电阻采样方式,实现了霍尔传感器模式和无传感器模式,其中霍尔传感器模式分为霍尔相序检测和霍尔控制电机转动,无传感器模式采用了非线性磁链观测器进行速度位置观测。 本电机驱动板可搭配GD32F303红枫派开发板使用,可实现电机正反转控制、霍尔传感器模式和无传感器模式以及电机调速等功能。 |
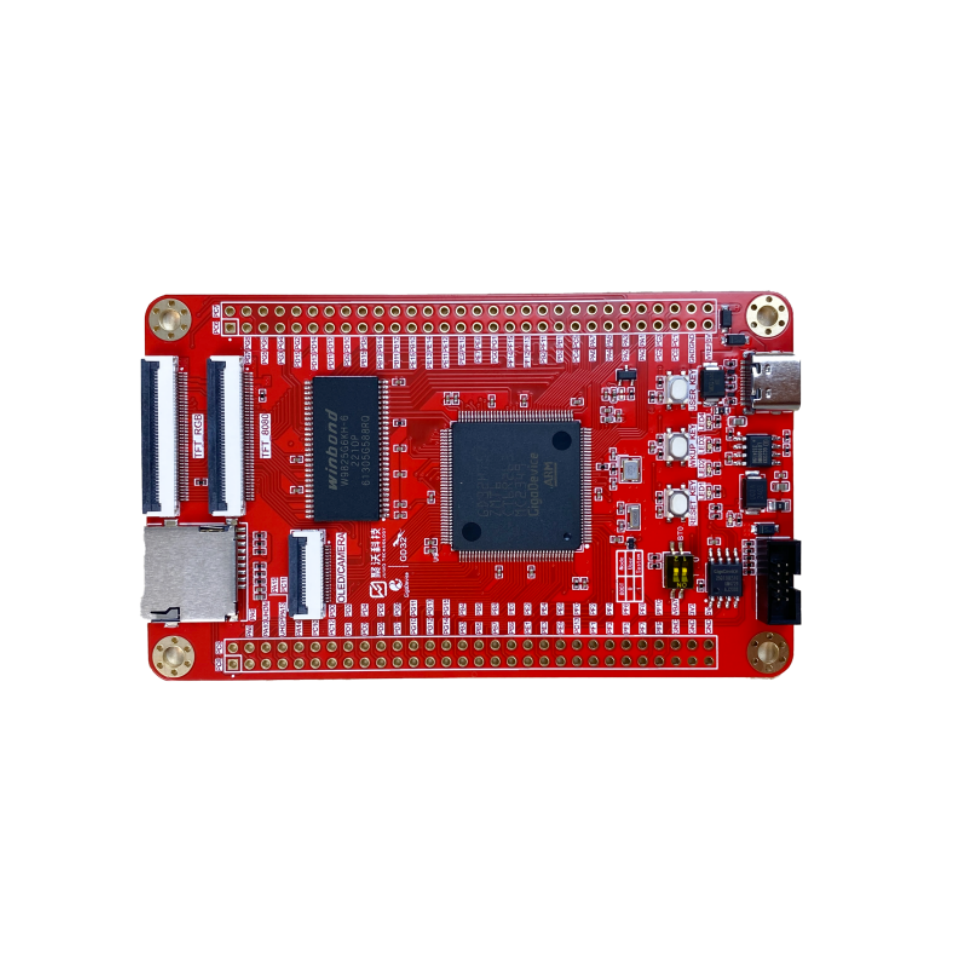
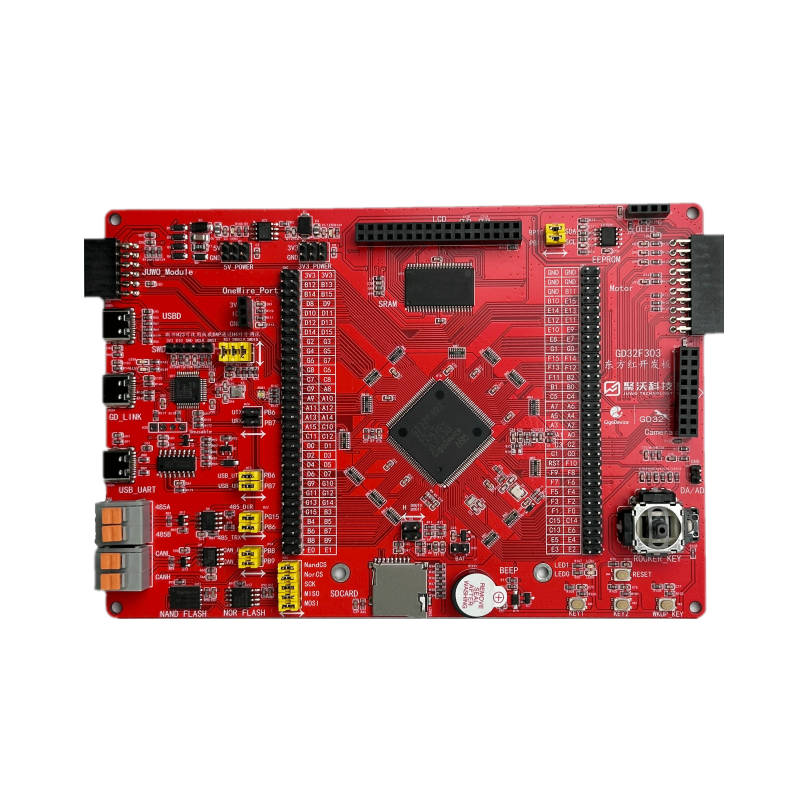
电机驱动板展示
聚沃科技电机驱动板具有以下特点:
• FOC矢量控制;
• 七段式SVPWM调制方式;
• 三电阻阻电流采样方式;
• 霍尔传感器调速;
• 非线性磁链观测器调速;
• 霍尔相序检测;
• 摇杆实现电机转速调节;
• 源代码开源便于学习及开发;
• 硬件可搭载聚沃开发板使用,目前可支持GD32F303红枫派开发板(后续会不断适配不同平台,切换平台不用更换电机板,可实现多平台的学习及应用评估)。
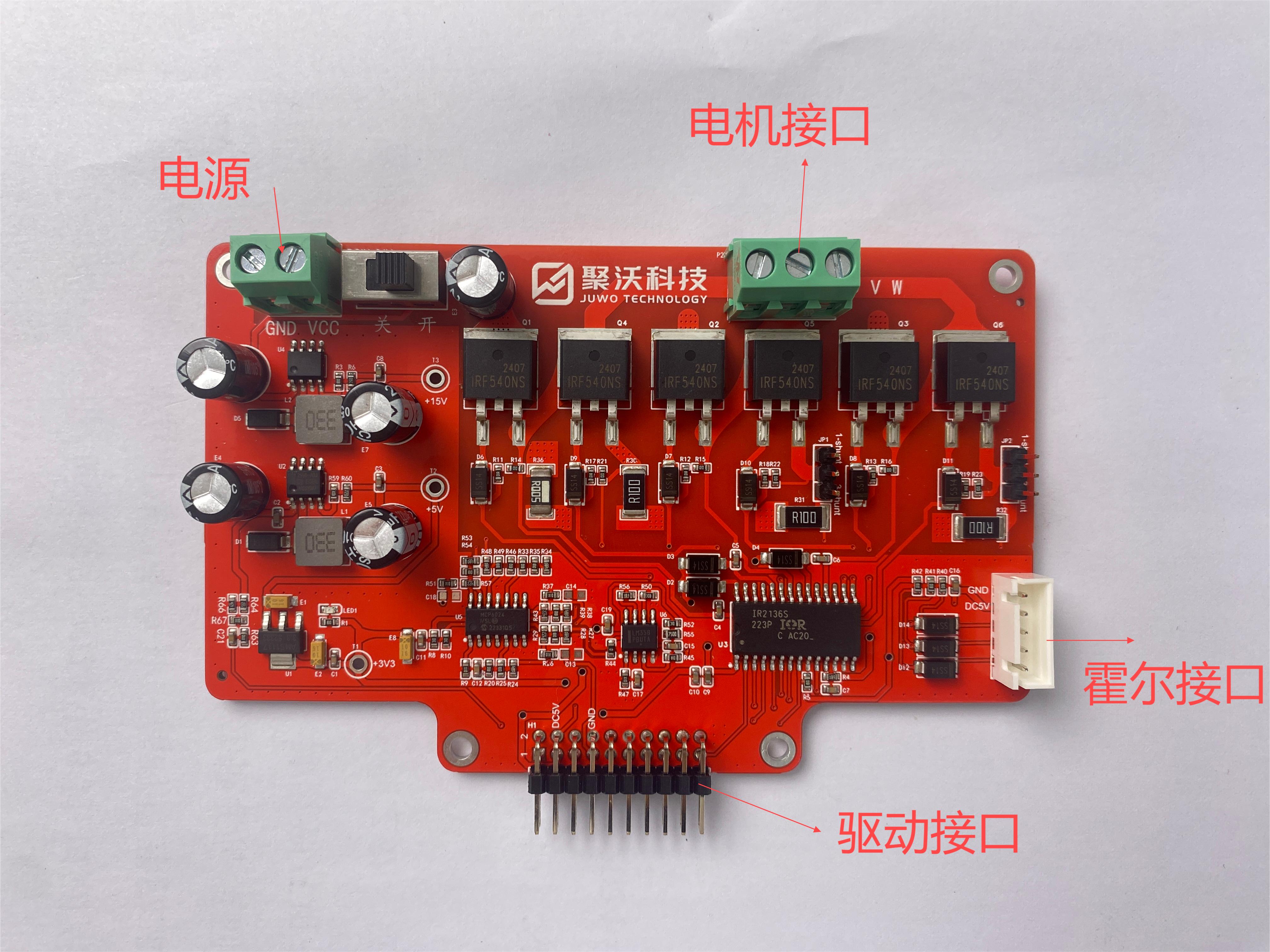
硬件资源简介
软件资源简介
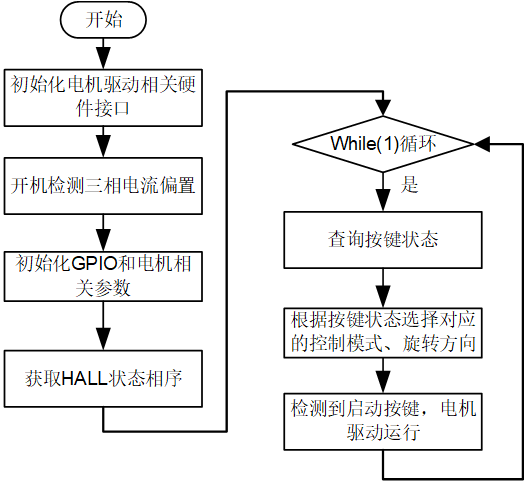
主程序流程如上图所示,电机上电后,首先配置电机驱动相关GPIO,TIMER0配置输出三对互补PWM波。
接着检测三相电流偏置,该步操作获取了三相电流的偏置电压,后续进行双闭环控制时,应减去该偏置得到真实电流,进行控制,当完成三相电流偏置采样后,接着配置3个ADC进行三相电流采样;
接着,获取写在FLASH里面的电机HALL相序,后续可根据电机HALL相序在HALL模式下控制电机转动。
代码进入到while(1),此时不断循环查询按键状态,当检测到模式按键时,会切换对应的控制模式,分别为霍尔模式,霍尔检测模式、磁链观测器模式,在不同模式下启动电机,电机会在该模式下运行。
霍尔检测模式:电机处在IF开环控制状态,同时电机d轴给定较大的电流,给定固定累加的电机开环角度,拖动电机转动,电机转动过程中,当检测到电机霍尔状态变化时,记录对应的HALL相序,在完成6个相序检测后,将对应的相序值写入到FLASH中。霍尔检测模式无需多次运行,在更换电机后,运行一次检测相序即可。
霍尔模式:电机运行在霍尔模式,在电机启动时,电机根据当前霍尔状态,读取对应的霍尔相序对应的角度值,控制电机转动,当电机转动起来后,会根据两个变化的霍尔相序之间的时间间隔计算电机转速,并根据电机转速,完成霍尔角度插补,实现角度平滑控制。
FOC控制原理
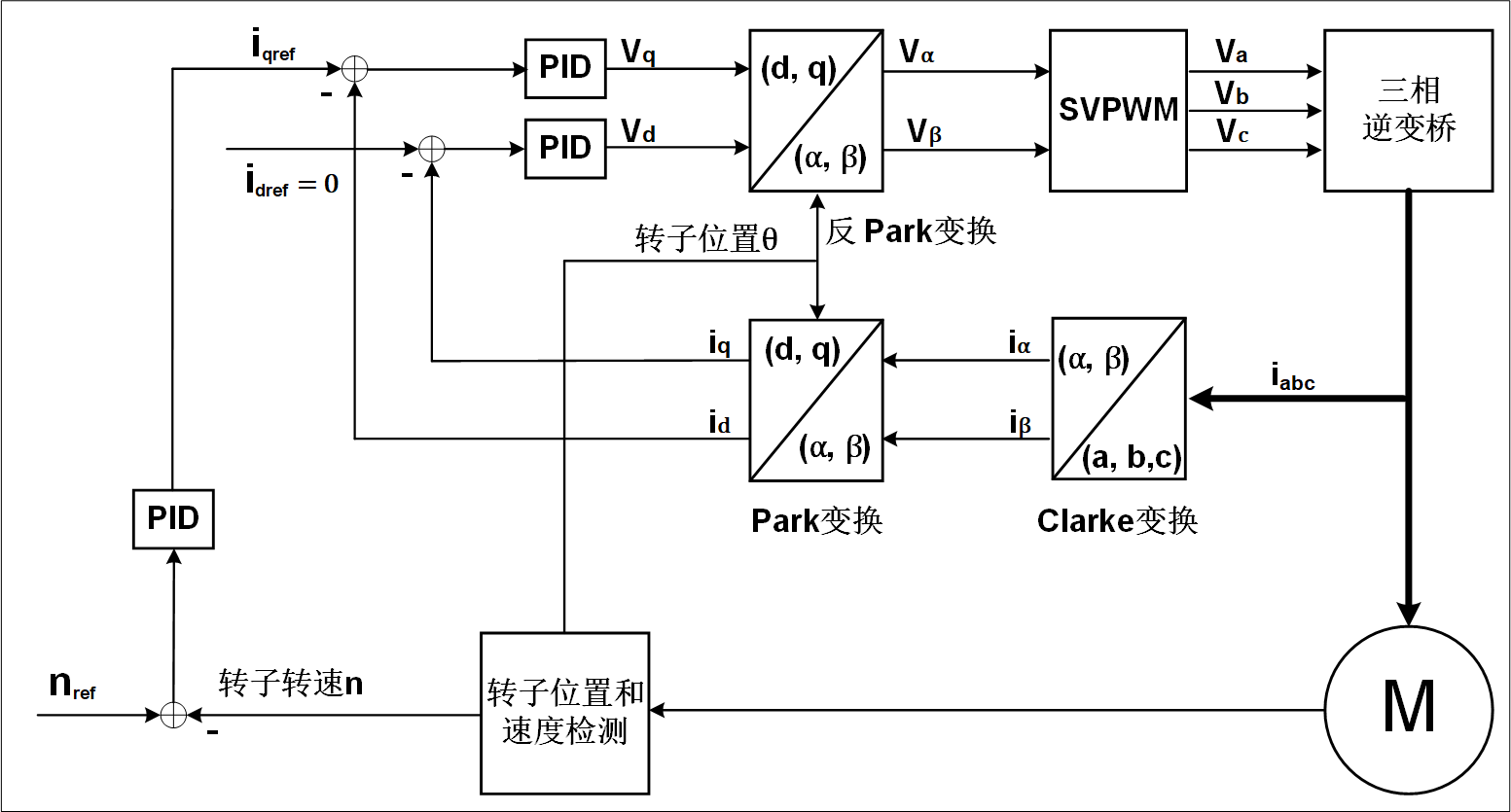
转速参考nref与转子转速n作差,输入到速度环PID,速度环的输出iqref作为q轴电流环给定,在不进行弱磁控制时,d轴电流环给定idref为0,dq轴电流参考idref、iqref与反馈电流id、iq作差经过PID调节后输出Vd、Vq,再经过反Park变换、SVPWM得到三相电压Va、Vb、Vc,驱动电机转动。在控制中,采集三相电流ia、ib、ic,经过Clark变换、Park变换得到反馈电流id、iq,参与电流环控制。
其中使用中各个变换过程的作用分别为:
• Clarke变换:作用于定子电流,将基于(A-B-C)三相静止坐标系的定子电流变换到(α-β)两相静止坐标系中;
• Park变换:作用于定子电流,将(α-β)两相静止坐标系下的电流量变换到(d-q)两相旋转坐标系中;
• Park逆变换:作用于定子电流,将反电势从旋转坐标系(d-q)变换到(α-β)静止坐标系中。
电流采样采用三电阻采样方式,串联在三相下桥臂的三相电阻分别对三相电流进行采样,采样结果分别为ia、ib、ic。采样电阻得到的是电压值,需要结合采样电阻值以及对应的放大倍数对真实电流进行还原,同时在得到的结果基础上需要减去对应的偏置电压。
电机参数
本开发板驱动BLDC(PMSM)电机相关参数如下表所示。
| 型号 | JK57BLS02 |
| 极数 | 4极 |
| 相电阻 | 0.33Ω |
| 额定电压 | DC24V |
| 额定转矩 | 0.22N·M |
| 额定转速 | 3000±10% RPM |
| 空载转速 | 3800±10% RPM |
| 空载电流 | 0.7 Amps Max |
| 输出功率 | 69W |
| 反电动势常数 | 6.3V/kRPM |
| 转矩常数 | 0.06 N·M/A |
| 绝缘等级 | Class B |
| 绕组连接方式 | 星形 |
©软件著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: 苏州聚沃电子技术有限公司 » 聚沃科技电机驱动板简介


发表评论 取消回复