【海棠派开发板】第九讲 USART-printf打印实验
9.1 实验内容
通过本实验主要学习以下内容:
• 串口简介
• GD32H757串口工作原理
• 使用printf打印信息
9.2 实验原理
9.2.1 串口简介
串口,从广义上看,指所有串行通信接口,比如RS232、RS422、RS485、SPI、IIC等。串行通讯是指仅用一根接收线和一根发送线就能将数据以位进行传输的通讯方式。和串行通讯相对应的是并行通讯,并行通信指一个传输接口可以传输8个bit即一个byte(有时甚至更多),虽然串行通信比并行通信慢,但是串口可以在仅仅使用两根线的情况下就能实现数据的传输。
对于GD32H757来说,串口一般特指USART(通用同步异步收发器 )和UART(通用异步收发器 )。USART/UART提供了一个灵活方便的串行数据交换接口,数据帧可以通过全双工或半双工,同步或异步的方式进行传输。海棠派开发板搭载的GD32H757最多有8个串口(USART+UART), 对于一般应用来说足够使用了。
9.2.2 串口通信帧介绍
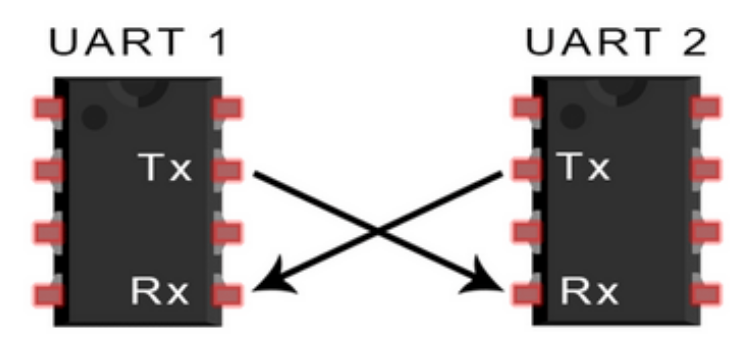
GD32H757的串口通信只需要3条线组成,分别为TX(发送线)、RX(接收线)和GND,对于两个通信结点,TX和RX需要交叉连接,如下示例:

下面来介绍下串口数据帧组成。
以下为一个标准的串口通信帧:

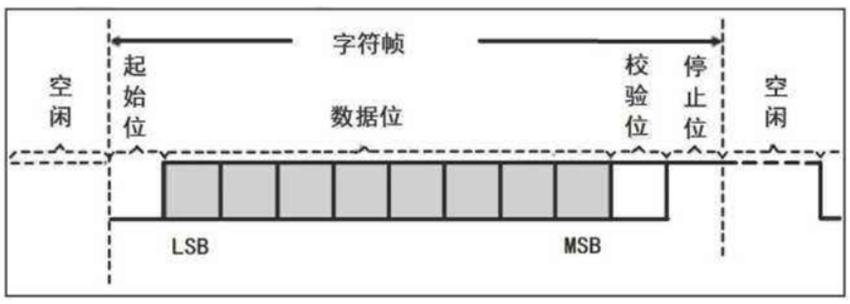
一个串口帧由空闲、起始位、数据位、校验位以及停止位组成,传输的数据地位在前,高位再后。
空闲:串口TX或RX数据线上没有传输任何数据时,则该线处于为空闲状态。空闲是TX和RX都是处于高电平。
起始位:占一个bit时间,标志数据起始,由一个逻辑0(低电平)的数据位表示。当发送方开始发送一帧数据时,起始位会最先发送,而对于接收方来说,检测到起始位后,即使自己的接收时钟与发送方的数据同步。
数据位:数据位紧跟在起始位之后,是通信中的真正有效信息。数据位的位数可以由通信双方共同约定,对于GD32H757来说,数据位一般只有8位。
校验位:校验位占一bit时间,GD32H757可以设置校验位为:奇校验、偶校验或无校验。校验位是为了保证通信的可靠性,如果是奇校验,需要保证传输的数据总共有奇数个逻辑高位,如果是偶校验,需要保证传输的数据总共有偶数个逻辑高位。以传输传输数据A:0x01000001为例,如果设置了奇校验,则需要在校验位传输“1”,如果是偶检验,则传输“0”。奇偶校验是由硬件处理的,当设置好校验位后,硬件会自动根据需要传输的数据自动插入校验位。
注意:GD32H757的数据位可设置为8bit和9bit两种方式,当设置了奇校验或偶校验,一定要将数据位设置为9bit;而设置了无校验时,需要将数据位设置为8bit。
停止位:它是一帧数据的结束标志,可以是1bit、1.5bit、2bit个逻辑“1”。
9.2.3 串口波特率
波特率是串口通信中一个非常重要的参数,串口通信传输双方必须要设置一样的串口波特率,否则通讯就会出错。波特率可以认为是比特率,即每秒传输的位数。一般波特率可以是9600、19200、115200等等,如果设置波特率为9600,设置通信帧为1bit起始位+8bit数据帧+无校验+1bit停止位,那么每秒钟最多可以传输9600bit/10bit = 960个字节。
现在重点介绍下GD32H757串口接收器的工作原理。GD32H757串口接收器支持16倍(默认)过采样和8倍过采样,16位过采样即发送方发送数据后,GD32470串口接受器会将每个bit采样16次,如果是8倍过采样,则采用8次。下图为16位过采样的示意图:

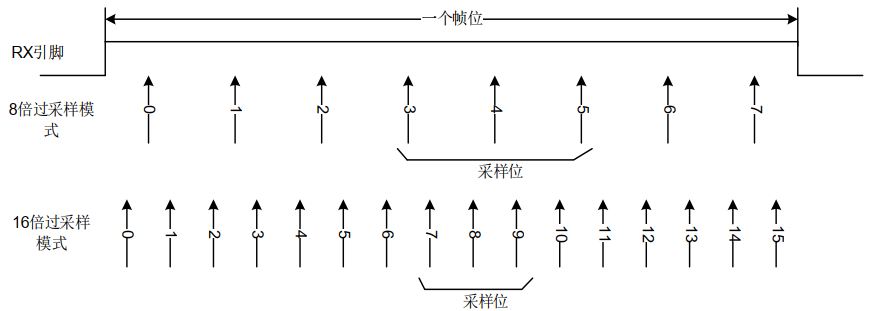
在默认情况下,接收器通过获取三个采样点的值来估计该位的值,其中16倍过采样选取采样点为第7、8、9点,而8倍过采样为第3、4、5采样点。如果在3个采样点中有2个或3个为0,该数据位被视为0,否则为1。如果3个采样点中有一个采样点的值与其他两个不同,不管是起始位,数据位,奇偶校验位或者停止位,都将产生噪声错误(NERR)。
9.2.4 GD32H757串口设置步骤
串口设置的一般步骤为:
- GPIO时钟开启、串口时钟开启
- GPIO设置,发送和接受都要设置为AF模式,且需要设置为正确的AF号
- 串口复位
- 串口参数配置,主要为波特率、数据位长度、校验位设置、停止位长度
- 依据是否需要使用中断或DMA进行中断配置或DMA配置
- 使能串口
- 编写中断处理函数
9.3 硬件设计
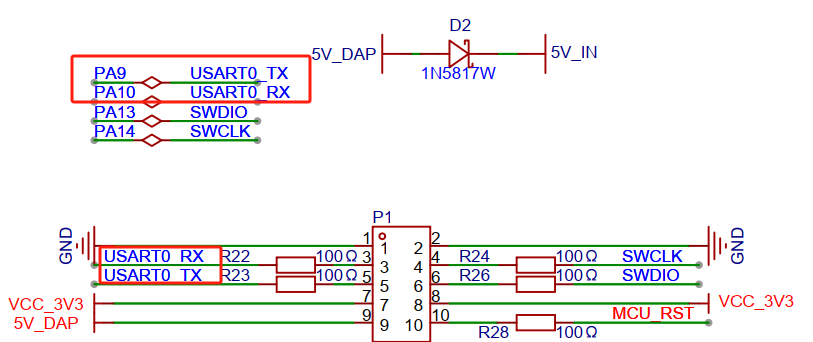
海棠派开发板的P1接口将USART0——PA9、PA10引出,读者可以通过P1口使用USART0:

9.4 代码解析
9.4.1 在driver_uart.c中定义了串口初始化函数driver_uart_init。
C
void driver_uart_init(typdef_uart_struct *uartx)
{
rcu_periph_clock_enable(uartx->rcu_uart_x);
/* USART configure */
usart_deinit(uartx->uart_x);
driver_gpio_general_init(uartx->uart_rx_gpio);
driver_gpio_general_init(uartx->uart_tx_gpio);
if(uartx->uart_mode_rx==MODE_DMA)
{
if(uartx->uart_rx_dma!=NULL)
{
driver_dma_com_init(uartx->uart_rx_dma,(uint32_t)&USART_RDATA(uartx->uart_x),NULL,DMA_Width_8BIT,DMA_PERIPH_TO_MEMORY);
usart_interrupt_enable(uartx->uart_x,USART_INT_IDLE);
}
}
if(uartx->uart_mode_tx==MODE_DMA)
{
if(uartx->uart_tx_dma!=NULL)
{
driver_dma_com_init(uartx->uart_tx_dma,(uint32_t)&USART_TDATA(uartx->uart_x),NULL,DMA_Width_8BIT,DMA_MEMORY_TO_PERIPH);
// usart_interrupt_enable(uartx->uart_x,USART_INT_TC);
}
}
usart_baudrate_set(uartx->uart_x, uartx->baudrate);
usart_receive_config(uartx->uart_x, USART_RECEIVE_ENABLE);
usart_transmit_config(uartx->uart_x, USART_TRANSMIT_ENABLE);
usart_word_length_set(uartx->uart_x, uartx->data_length);
usart_parity_config(uartx->uart_x, uartx->parity);
usart_enable(uartx->uart_x);
}
9.4.2 重定向函数int fputc(int ch, FILE *f)
要使用Printf,重定向函数fputc 是必须的。在C 语言标准库中,fputc 函数是printf 函数内部的一个函数,功能是将字符ch 写入到文件指针file所指向文件的当前写指针位置,简单理解就是把字符写入到特定文件中。我们使用USART 函数重新修改fputc 函数内容,达到类似“写入”的功能。
fputc定义在bsp_uart.c中
C
int fputc(int ch, FILE *f)
{
driver_uart_transmit_byte(&BOARD_UART,(uint8_t)ch);
return ch;
}
这个函数比较简单,就是调用了接口driver_uart_transmit_byte,该接口定义在driver_uart.c中:
C
Drv_Err driver_uart_transmit_byte(typdef_uart_struct *uartx,uint8_t data)
{
__IO uint64_t timeout = driver_tick;
while(uartx->uart_control.Com_Flag.Bits.SendState==1){
if((timeout+UART_TIMEOUT_MS) <= driver_tick) {
uartx->uart_control.Com_Flag.Bits.SendState=0;
return DRV_ERROR;
}
}
Drv_Err uart_state=DRV_SUCCESS;
uartx->uart_control.Com_Flag.Bits.SendSuccess=0;
uartx->uart_control.Com_Flag.Bits.SendState=1;
uart_state=driver_uart_flag_wait_timeout(uartx,USART_FLAG_TBE,SET);
usart_data_transmit(uartx->uart_x,data);
uartx->uart_control.Com_Flag.Bits.SendSuccess=1;
uartx->uart_control.Com_Flag.Bits.SendState=0;
return uart_state;
}
这段代码作用是,循环去读串口的TBE标志位,并且将待发送的数据写到串口寄存器中。
9.4.3 main函数实现
串口初始化完成并定义好fputc重定向函数后,就可以通过printf函数往电脑上打印数据了。以下main函数:
C
int main(void)
{
//延时和公共驱动部分初始化
driver_init();
//串口初始化,DMA模式开启
BOARD_UART.uart_mode_tx=MODE_DMA;
bsp_uart_init(&BOARD_UART);
bsp_led_init(&LED2);
//打开对应串口的中断
nvic_irq_enable(USART0_IRQn,2,0);
while(1)
{
//printg标准打印(轮训)
printf_log("\r\ndelay 1s \r\n");
delay_ms(1000);
bsp_led_toggle(&LED2);
printf_log("printf:system driver_tick is %lld \r\n",driver_tick);
//轮训方式打印
memset(uart_poll_buff,0,50);//清零buff
sprintf((char*)uart_poll_buff,"poll transmit:system driver_tick is %lld \r\n",driver_tick);//格式化字符串
driver_uart_poll_transmit(&BOARD_UART,uart_poll_buff,strlen((const char*)uart_poll_buff));
printf_log("%s",uart_poll_buff);
//中断方式打印
memset(uart_int_buff,0,50);
sprintf((char*)uart_int_buff,"int transmit:system driver_tick is %lld \r\n",driver_tick);
driver_uart_int_transmit(&BOARD_UART,uart_int_buff,strlen((const char*)uart_int_buff));
printf_log("%s",uart_int_buff);
//DMA方式打印
memset(uart_dma_buff,0,50);
sprintf((char*)uart_dma_buff,"dma transmit:system driver_tick is %lld \r\n",driver_tick);
driver_uart_dma_transmit(&BOARD_UART,uart_dma_buff,strlen((const char*)uart_dma_buff));
printf_log("%s",uart_dma_buff);
}
}
本例程main函数首先进行了延时函数初始化,并设置了一个LED灯用来提示代码运行。while(1)循环中先延时1s,再翻转一次LED状态,接着使用printf函数打印系统运行tick时间。
本例程也同步做了printf打印在LCD屏幕的功能,将LCD屏接在海棠派开发板上后,打印信息将同步在显示屏上显示。
9.5 实验结果
使用USB转TTL串口的连接线后,配置好串口调试助手,即可看到每秒钟串口打印的数据了。



