【红枫派开发板】第二十一讲 I2C-EEPROM读写实验
21.1 实验内容
通过本实验主要学习以下内容:
• AT24C16 EEPROM的工作原理;
• IIC模块原理以及IIC驱动原理。
21.2 实验原理
21.2.1 AT24C16 EEPROM的工作原理
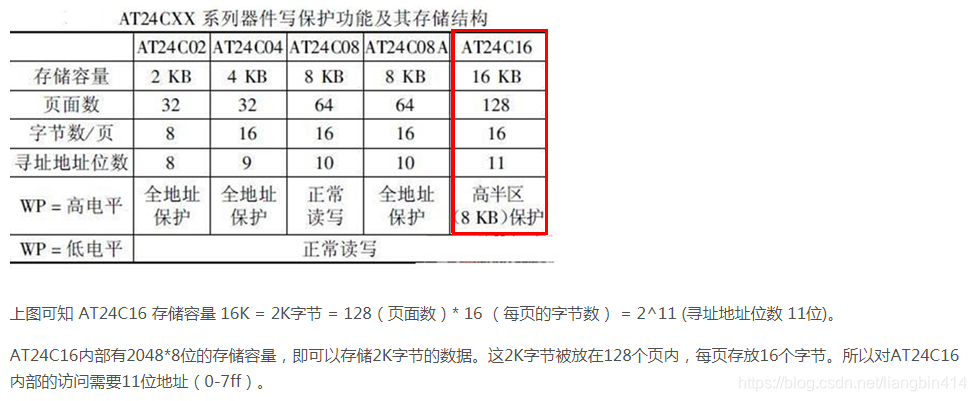
下图为AT24CXX系列EEPROM相关参数,由该图可知,AT24C16的存储容量为16Kbit,共2048字节,共128页,每页为16字节。

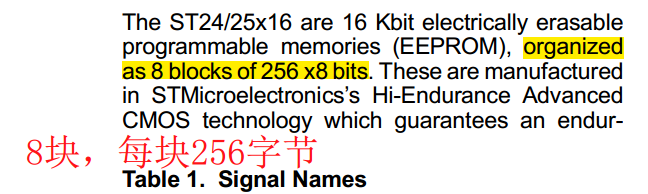
由下图可知,AT24C16由8块组成,每块256字节。

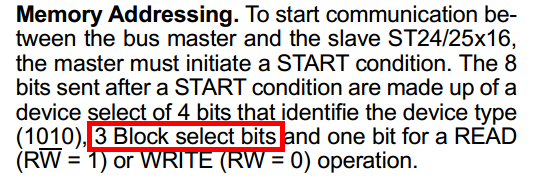
I2C开始信号后,第一个字节为器件地址,由1010+3位块地址+1位读写标志组成, 3位块地址刚好可以表示 8个块, 所以一次写完256字节,换到下一下块的时候,要重新更改器件地址。

AT24C16支持页写入模式,一次最多可支持写入16字节。主机每发送一个字节,24c16收到确认,内部地址递增(仅限低4bit,所以1次可写16字节)。
21.2.2 IIC接口原理
GD32F30X系列MCU的I2C 接口模块实现了I2C 协议的标速模式,快速模式以及快速+模式,具备CRC 计算和校验功能、支持 SMBus(系统管理总线)和PMBus(电源管理总线),此外还支持多主机 I2C 总线架构,其主要特性如下:
◼ 并行总线至 I2C 总线协议的转换及接口;
◼ 同一接口既可实现主机功能又可实现从机功能;
◼ 主从机之间的双向数据传输;
◼ 支持 7 位和 10 位的地址模式和广播寻址;
◼ 支持 I2C 多主机模式;
◼ 支持标速(最高 100 KHz),快速(最高 400 KHz)和快速+ 模式(最高 1MHz);
◼ 从机模式下可配置的 SCL 主动拉低;
◼ 支持 DMA 模式;
◼ 兼容 SMBus 2.0 和 PMBus;
◼ 两个中断:字节成功发送中断和错误事件中断;
◼ 可选择的 PEC(报文错误校验)生成和校验。
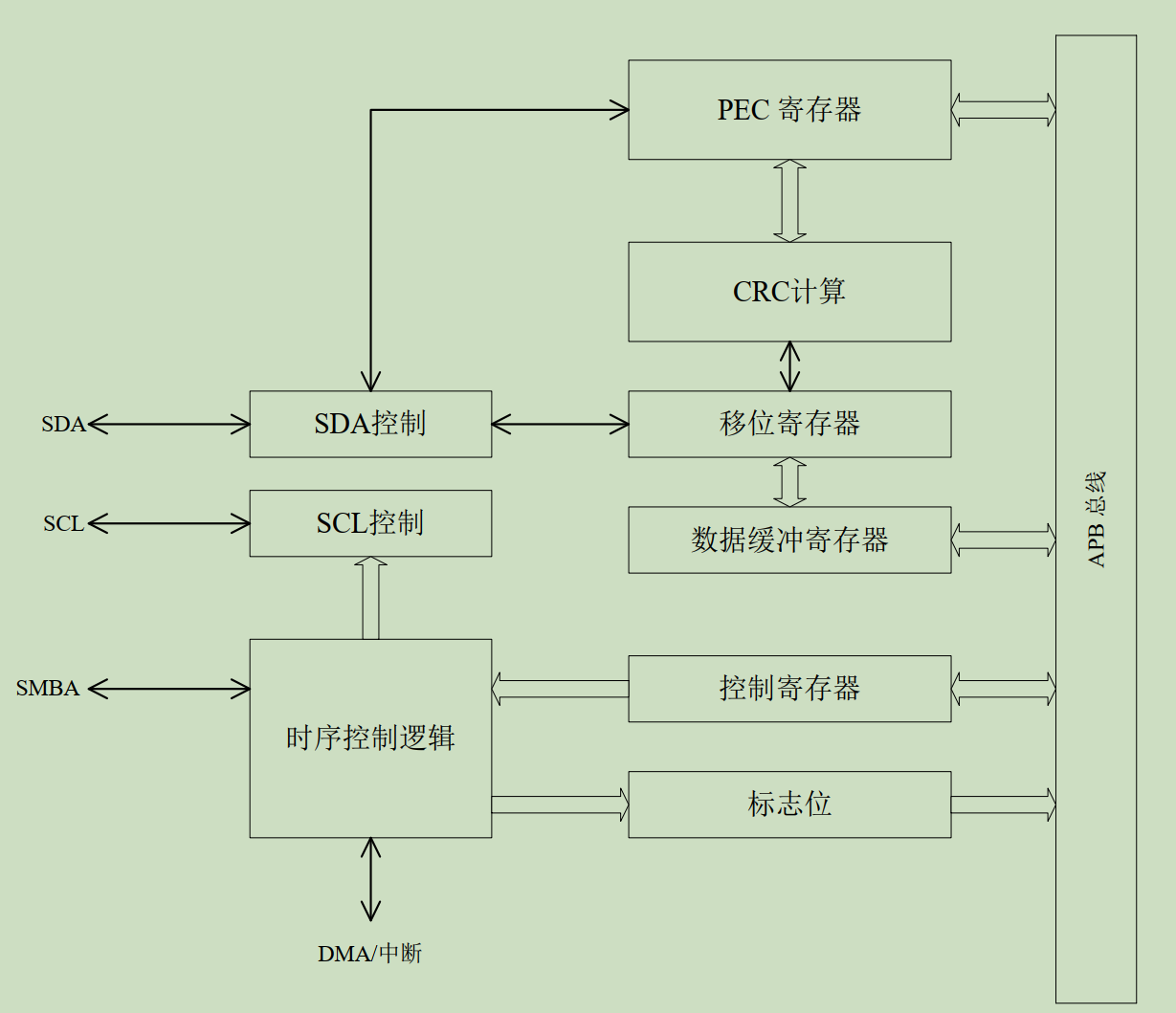
IIC模块结构框图如下所示。

21.3 硬件设计
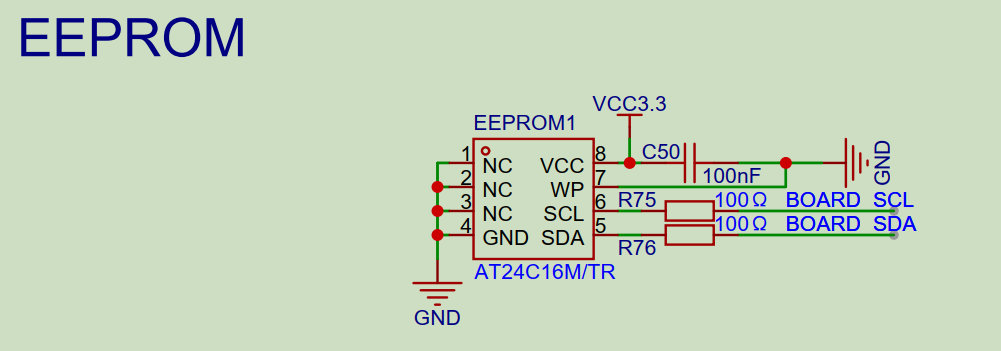
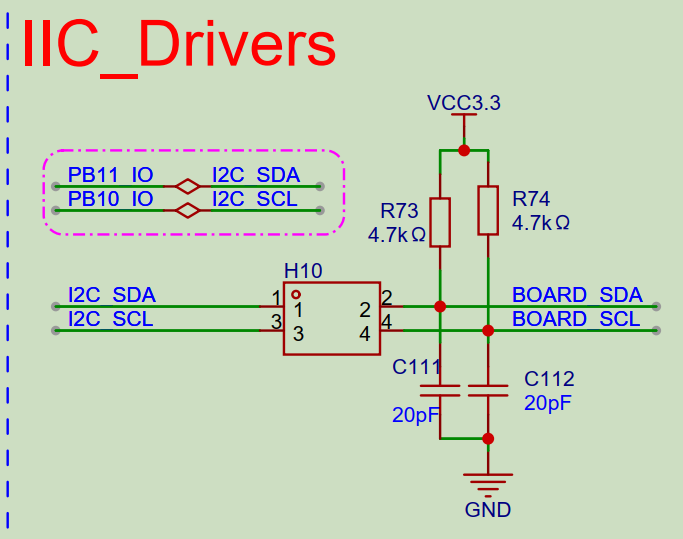
EEPROM硬件电路图如下所示,IIC引脚使用PB10和PB11引脚,SDA和SCL总线通过4.7K电阻上拉,且对地接30pf电容以及100欧姆串阻滤波。


21.4 代码解析
21.4.1 EEPROM初始化配置函数
EEPROM初始化配置函数如下,主要实现对IIC总线引脚配置以及IIC模块配置。
C
void bsp_eeprom_init_AT24C16(void)
{
driver_i2c_init(&EEPROM_I2C);
}
void driver_i2c_init(typdef_i2c_struct *i2cx)
{
rcu_periph_clock_enable(i2cx->rcu_i2c_x);
i2c_deinit(i2cx->i2c_x);
driver_gpio_general_init(i2cx->i2c_scl_gpio);
driver_gpio_general_init(i2cx->i2c_sda_gpio);
/* I2C clock configure */
i2c_clock_config(i2cx->i2c_x, i2cx->frequency, I2C_DTCY_2);
/* I2C address configure */
i2c_mode_addr_config(i2cx->i2c_x, I2C_I2CMODE_ENABLE, I2C_ADDFORMAT_7BITS, i2cx->slave_addr);
/* enable I2C0 */
i2c_enable(i2cx->i2c_x);
/* enable acknowledge */
i2c_ack_config(i2cx->i2c_x, I2C_ACK_ENABLE);
}
21.4.2 EEPROM buf写入接口函数
EEPROM buf写入接口函数实现如下,通过该函数可实现对AT24C16任意地址的多字节写入。内部已根据地址和写入长度自动识别从机地址以及对应的块,然后写入正确的地址空间。
C
EEPROM_STATE eeprom_buffer_write_AT24C16(uint8_t* p_buffer, uint16_t write_address, uint16_t number_of_byte)
{
uint8_t number_of_page = 0, number_of_single = 0, address = 0, count = 0;
uint8_t deviceId;
address = write_address % I2C_PAGE_SIZE;
count = I2C_PAGE_SIZE - address;
number_of_page = number_of_byte / I2C_PAGE_SIZE;
number_of_single = number_of_byte % I2C_PAGE_SIZE;
if(write_address+write_address>EEPROM_SIZE)
{
return EEPROM_ERROR;
}
/* if write_address is I2C_PAGE_SIZE aligned */
if(0 == address){
while(number_of_page--){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer,I2C_PAGE_SIZE) == DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C) == EEPROM_ERROR)
{
return EEPROM_ERROR;
}
write_address += I2C_PAGE_SIZE;
p_buffer += I2C_PAGE_SIZE;
}
if(0 != number_of_single){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer, number_of_single)==DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C) == EEPROM_ERROR)
{
return EEPROM_ERROR;
}
}
return EEPROM_SUCCESS;
}else{
/* if write_address is not I2C_PAGE_SIZE aligned */
if(number_of_byte < count){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer, number_of_byte)==DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C)==EEPROM_ERROR)
{
return EEPROM_ERROR;
}
}else{
number_of_byte -= count;
number_of_page = number_of_byte / I2C_PAGE_SIZE;
number_of_single = number_of_byte % I2C_PAGE_SIZE;
if(0 != count){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer, count)==DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C)==EEPROM_ERROR)
{
return EEPROM_ERROR;
}
write_address += count;
p_buffer += count;
}
/* write page */
while(number_of_page--){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer, I2C_PAGE_SIZE)==DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C)==EEPROM_ERROR)
{
return EEPROM_ERROR;
}
write_address += I2C_PAGE_SIZE;
p_buffer += I2C_PAGE_SIZE;
}
/* write single */
if(0 != number_of_single){
deviceId=(write_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((write_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_write(&EEPROM_I2C,deviceId,write_address,MEM_ADDRESS_8BIT,p_buffer, number_of_single)==DRV_ERROR)
{
return EEPROM_ERROR;
}
if(eeprom_wait_standby_state(&EEPROM_I2C)==EEPROM_ERROR)
{
return EEPROM_ERROR;
}
}
}
return EEPROM_SUCCESS;
}
}
21.4.3 EEPROM buf读取接口函数
EEPROM buf读取接口函数实现如下,通过该函数可实现对EEPROM任意地址的多字节数据读取,内部也对读取的地址进行自动识别从机地址。
C
EEPROM_STATE eeprom_buffer_read_AT24C16(uint8_t* p_buffer, uint16_t read_address, uint16_t number_of_byte)
{
uint8_t rNum=0; //读取的数据长度
uint16_t lenLeft=number_of_byte;//剩余的数据长度
uint8_t deviceId;//读取的器件地址
if(read_address+number_of_byte>EEPROM_SIZE)//如果读取的长度加上读取地址超过了EEPROM的空间大小,则报错误
{
return EEPROM_ERROR;
}
/*calculate the current read position to know how many word can read continully*/
rNum=16-read_address & 0x0F;
if(rNum == 0) rNum=16;
rNum = lenLeft>=rNum ? rNum : lenLeft;//剩余未读字节数如果大于rNum, 则读rNum个,如果小于rNum,则一次读完了
/*read the data from e2prom*/
while(lenLeft)
{
//这里计算页地址,当地址小于256时,右移8位会小于0,所以器件地址为基地址A1
//如果读取的地址大于256时,右移8位则不会小于0,所以器件地址为 基地址A1 | 3位页地址
deviceId=(read_address>>8)>0 ? (EEPROM_ADDR | (uint8_t)((read_address>>7)&0x0E)):EEPROM_ADDR ;
if(driver_i2c_mem_poll_read(&EEPROM_I2C,deviceId,read_address,MEM_ADDRESS_8BIT,p_buffer,rNum)==DRV_ERROR)
{
// printf("i2c read error\r\n");
return EEPROM_ERROR;
}
read_address+=rNum;//已经读了rNum个了,所以地址后移rNum个
lenLeft-=rNum;//剩余未读数据减少rNum个
p_buffer+=rNum;
rNum=lenLeft>16? 16 : lenLeft;//如果剩余大于16个,则下次再读16个,如果小于,则一次读完
}
return EEPROM_SUCCESS;
}
21.4.4 EEPROM读写实验主函数
EEPROM读写实验主函数如下所示。通过该实验实现对AT24C16任意地址256字节的写入、读取以及校验测试。
C
int main(void)
{
uint16_t i;
uint8_t i2c_buffer_write[BUFFER_SIZE];
uint8_t i2c_buffer_read[BUFFER_SIZE];
bsp_eeprom_init_AT24C16();
/* initialize i2c_buffer_write */
for(i = 0;i < BUFFER_SIZE;i++){
i2c_buffer_write[i]=i;
// printf("0x%02X ",i2c_buffer_write[i]);
// if(15 == i%16){
// printf("\r\n");
// }
}
if(eeprom_buffer_write_AT24C16(i2c_buffer_write,0x0153,BUFFER_SIZE)==EEPROM_SUCCESS)
{
__nop();
}
if(eeprom_buffer_read_AT24C16(i2c_buffer_read,0x0153,BUFFER_SIZE)==EEPROM_SUCCESS)
{
__nop();
}
/* compare the read buffer and write buffer */
for(i = 0;i < BUFFER_SIZE;i++){
if(i2c_buffer_read[i] != i2c_buffer_write[i]){
__nop();
// printf("0x%02X ", i2c_buffer_read[i]);
// printf("Err:data read and write aren't matching.\n\r");
// return I2C_FAIL;
}
//printf("0x%02X ", i2c_buffer_read[i]);
// if(15 == i%16){
// printf("\r\n");
// }
}
__nop();
// printf("I2C-AT24C02 test passed!\n\r");
while (1)
{
}
}
21.5 实验结果
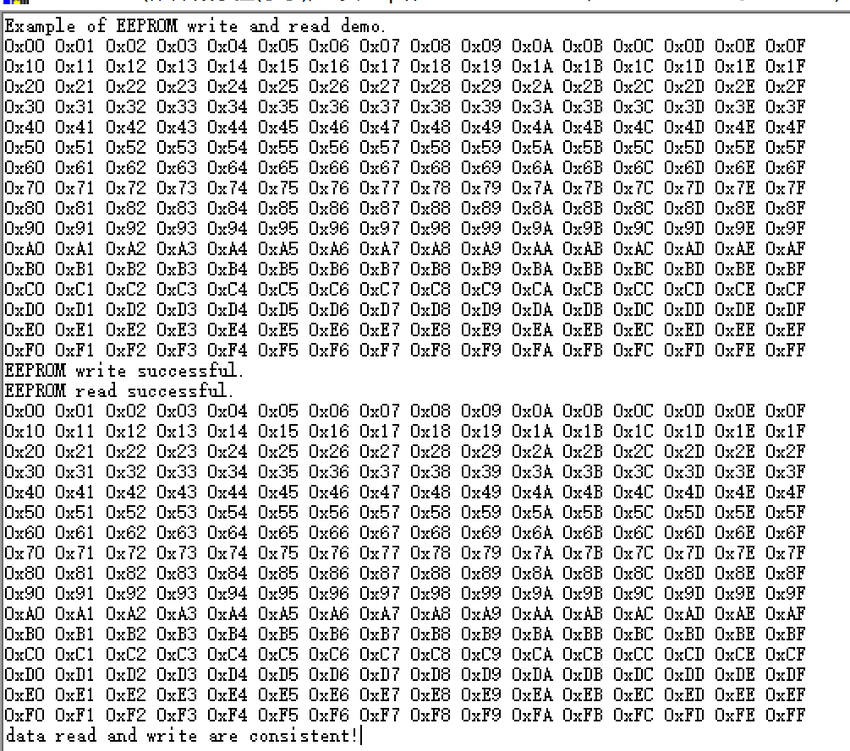
将本实验历程烧录到红枫派开发板中,运行后,可通过串口打印测试结果,可实现对于AT24C16任意地址写入、读取以及校验。

红枫派开发板使用手册:GD32F303红枫派使用手册 - 飞书云文档 (feishu.cn)



