【红枫派开发板】第十八讲 USART-485通信实验
18.1 实验内容
通过本实验主要学习以下内容:
• 485工作原理
• 串口单线工作原理
18.2 实验原理
18.2.1 485工作原理
485一般指RS485。RS485名TIA-485-A, ANSI/TIA/EIA-485或TIA/EIA-485,是由电信业协会和电业联盟定义。RS485就是个硬件通信协议,它规定当两线间电压差为+2V ~ +6V时为逻辑“1”,电压差为-2V ~ -6V时为逻辑“0”
RS-485的特点:由于485信号是利用差模传输的,即由485+与485-的电压差来作为信号传输。如果外部有个扰源对其进行干扰,使双绞线进行485信号传输的时候,由于其双绞,干扰对于485+,485-的干扰效果都是样的,那电压差依然是不变的,对于485信号的干扰缩到了最小。同样的道理,如果有屏蔽线起到屏蔽作的话,外部扰源对于其的扰影响也可以尽可能的缩小。
485布线规范是必须要牵的布线,旦没有借助485集线器和485中继器直接布设成星型连接和树形连接,很容易造成信号反射导致总线不稳定。
485总线必须要单点可靠接地。单点就是整个485总线上只能是有个点接地,不能多点接地,因为将其接地是因为要将地线(般都是屏蔽线作地线)上的电压保持致,防止共模扰,如果多点接地适得其反。
RS-485 与 MCU
MCU的输出和读取都是TTL电平,一般情况下由地线和信号线组成,在远距离传输的情况下,信号线上的干扰信号会随着有效信号被传递到接收端,使得通信容易被干扰。 与之相对的,485协议输出的是差分信号,经过TTL转485芯片的转换后其有效信息为两条信号线的电压差,即可大大消除通信时的共模干扰,同时由于其传递的信息随时可以在硬件层面上被测量,而且整个转换过程完全为硬件操作,无需软件编写,因此是种硬件协议。

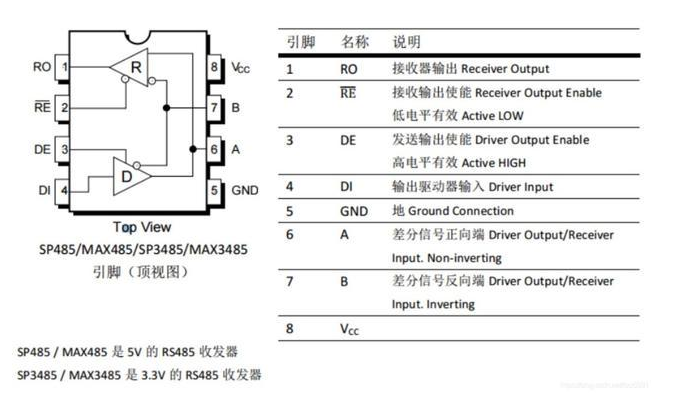
TTL-485转换器的真值表
实际操作时,芯片的接收器输出端RO与单片机的Rx相连,驱动器输端DI则与单片机的Td相连
驱动器的输出逻辑
485芯片既有全双通信,也有半双工通信,如果485为半双工通信模式,其在发送信息时便无法读取信息,因此当DE被拉高时完全处于发送信息的状态,此时DI接受单片机写入的数字信号,当输信号DI为1时输出正的差分信号,即A-B>0.2V。当输信号DI为0时输出负差分信号,即B-A>-0.2V(有些芯片是0.3V,如SP3485)

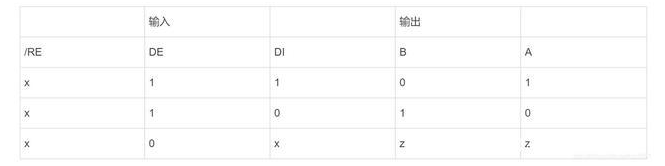
当DE被拉低时,依据/RE(低电平有效)的电平判断作状态,当/RE为高时,整个器件不工作,输出高阻态,当其在低电平下使能时,则由输的AB差分信号向RO输出0或1。
18.2.2 串口单线工作原理
本实验中,我们使用串口的TX线同时实现发送和接受的功能。
通过设置USART_CTL2寄存器的HDEN位,可以使能单线模式。在单线模式下, TX引脚和RX引脚将从内部连接到一起, RX引脚不再使用。 TX引脚应该被配置为开漏输出模式。通信冲突由软件处理。当发送时,需要关闭串口接受功能,打开发送功能;当接受时,需要关闭串口发送功能,打开接受功能。
18.3 硬件设计
红枫派开发板485硬件设计如下:

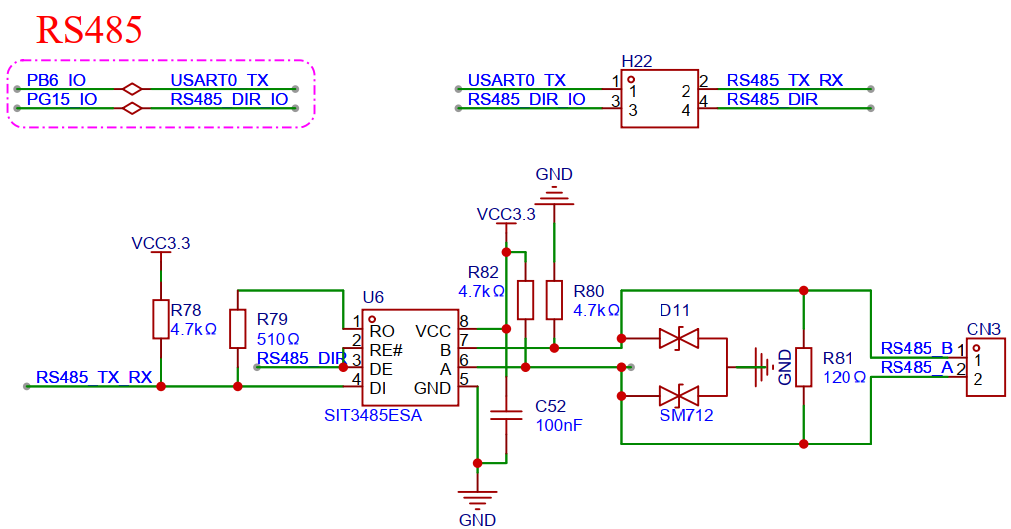
即使用PB6实现发送和接收,使用PG15用来控制485传输方向。
18.4 代码解析
18.4.1 485发送函数
在bsp_uart.c中,定义了485发送函数:
C
void bsp_rs485_uart_transmit(uint8_t *pbuff,uint16_t length)
{
uint32_t timeout = driver_tick;
while(BOARD_UART.uart_control.Com_Flag.Bits.RecState==1 && BOARD_UART.uart_control.RecCount!=0){
if((timeout+UART_TIMEOUT_MS) <= driver_tick) {
BOARD_UART.uart_control.Com_Flag.Bits.RecState=0;
}
}
driver_gpio_pin_set(&RS485_DIR);
usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_DISABLE);
usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_ENABLE);
if(BOARD_UART.uart_mode_tx==MODE_DMA)
{
driver_uart_dma_transmit(&BOARD_UART,pbuff,length);
}
else if(BOARD_UART.uart_mode_tx==MODE_INT)
{
driver_uart_int_transmit(&BOARD_UART,pbuff,length);
}
else if(BOARD_UART.uart_mode_tx==MODE_POLL)
{
driver_uart_poll_transmit(&BOARD_UART,pbuff,length);
usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_ENABLE);
usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_DISABLE);
driver_gpio_pin_reset(&RS485_DIR);
}
}
18.4.2 485接受函数
在bsp_uart.c中定义了485接受函数:
C
void bsp_rs485_uart_receive(uint8_t *pbuff,uint16_t length)
{
uint32_t timeout = driver_tick;
while(BOARD_UART.uart_control.Com_Flag.Bits.SendState==1){
if((timeout+UART_TIMEOUT_MS) <= driver_tick) {
BOARD_UART.uart_control.Com_Flag.Bits.SendState=0;
}
}
usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_ENABLE);
usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_DISABLE);
driver_gpio_pin_reset(&RS485_DIR);
if(BOARD_UART.uart_mode_rx==MODE_DMA)
{
driver_uart_dma_receive(&BOARD_UART,pbuff,length);
}
else if(BOARD_UART.uart_mode_rx==MODE_INT)
{
driver_uart_int_receive(&BOARD_UART,pbuff,length);
}
else if(BOARD_UART.uart_mode_rx==MODE_POLL)
{
driver_uart_poll_receive(&BOARD_UART,pbuff,length);
}
}
18.4.3 main函数实现
以下为main函数代码:
C
int main(void)
{
delay_init();
//初始化UART为中断模式,注册接受完成(IDLE)回调函数
BOARD_UART.uart_mode_tx=MODE_DMA;
BOARD_UART.uart_mode_rx=MODE_DMA;
BOARD_UART.uart_idle_callback=user_receive_complete_callback;
bsp_rs485_uart_init();
nvic_irq_enable(USART0_IRQn,2,0);
delay_ms(1000);
//配置UART接受,最长100byte
bsp_rs485_uart_receive(uart_rec_buff,100);
while (1)
{
//查询到接受完成回调函数标志
if(uart_receive_complete_flag==SET)
{
uart_receive_complete_flag=RESET;
//发送刚接受到的数据
bsp_rs485_uart_transmit(uart_rec_buff,uart_receive_count);
}
}
}
本例程main函数首先进行了延时函数初始化,再初始化485为中断模式,接着配置串口BOARD_UART,开启串口中断NVIC,这里使用到了IDLE中断,然后配置485接受(DMA方式),最长100个字节,所以我们可以给485发送100个字节以下长度的数据。在while(1)循环中循环查询uart_receive_complete_flag标志位,当该标志位为“SET”时,表示IDLE中断被触发,一帧数据接受完,最后将接收到的帧数据通过DMA发送方式原封不动发送到485上。
18.5 实验结果
使用USB转485转接线,将A、B线接好,使用串口调试助手发送一帧数据到MCU,MCU会将这帧数据回发到串口调试助手中。
红枫派开发板使用手册:GD32F303红枫派使用手册 - 飞书云文档 (feishu.cn)



